从天文成象中,我们知道各种大气条件和天气影响对成象质量有影响。这是由于光程中空气的折射率发生了局部变化。这些变化依赖于波长,并随大气压和湿度的变化而变化。
在机器视觉领域,压力和湿度通常可以假定在整个光程上是恒定的。然而,这个规则有一个例外,如果在光路中有湍流气流,可能导致局部压力变化。湍流的一个典型原因是不同温度下各部分之间的热对流。机器视觉中常见的热源可以是照明、高负载电子器件或高温样品,如浇注的金属。
对行扫描相机成像的影响
湍流空气中的不同折射率就像一个渐变透镜,使受影响区域的图像内容发生扭曲。翘曲的大小和延伸既太复杂,又太依赖于建立数学模型。相反,我们展示了这个效果的一个测量示例,以表示它的典型大小,并指导您在自己的设置中测量它。
在直线扫描相机中,沿扫描方向的每条直线的光学畸变是恒定的,因此在图像中不可见。这一事实将问题简化为一个空间维度——垂直于扫描方向——和时间维度。利用线扫描相机获取静态目标的图像,可以同时观察到这两个维度。光学畸变将使图像内容的位置在x方向上发生位移,而在y方向上变形的扩展表示时间信息。
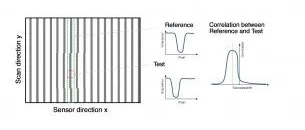
这种位移可以很容易地通过成像静态线图来测量。这种测量的基本原理如图1所示(上图)。参考图像强度剖面图是通过对一个感兴趣的区域进行平均,该区域包含每个x位置周围的几个列(用绿色表示)。一个正方形的测试块(用红色表示)沿着整列传递,对每一个位置的测试数据通过插值以亚像素的步骤进行移动。对每个像素记录测试和参考之间具有最高相关性的偏移,并可以绘制在一个彩色比例图像中以使数据可视化。
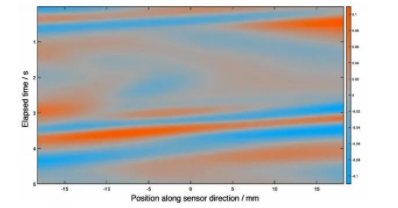
图2 彩色图像表示的测量图像位移,颜色尺度以亚像素单位表示偏移
图2显示了使用光学分辨率为5°m的Chromasens allPIXA相机捕获的静态线模式图像的可视化。在这种情况下,热源是Chromasens Corona II管belight照明,运行在最大的LED电流。在这种设置中,光学失真的幅度在<0.15像素的范围内。湍流在移位图像中可以看到类似的畸变区域。它们的长度在10mm – 30mm之间,持续时间在200ms – 800ms之间。
该测量表明,标准照明产生的热对流对图像扰动的大小不会对标准检查任务产生明显影响。然而,依赖于亚像素精度的特殊图像处理任务(例如亚像素精确特征提取或基于亚像素的图像相关性)可能会由于这些畸变而降低测量精度。
抑制图像变形
通过防止湍流可以抑制图像的翘曲效应。为此目的,可以利用风扇来产生层流气流。由于层流中的压力是恒定的,所以不会发生梯度透镜效应。气流要么需要覆盖热源的整个表面,要么需要覆盖光路的整个体积,在那里可能出现湍流。

图3 推荐的抑制设置为Chromasens管belight设置。为便于说明,传感器在左侧被描述为一个红点,在右侧被描述为一条红线
对于线扫描相机,第二种选择通常更容易实现,因为光路被限制在一个平面上。因此,风扇可以按照传感器线的流向安装在相机的一侧。在上面的例子中,在管状管的观察缝的正下方的体积中的空气需要层流灌注。由于照明块的侧壁为气流提供了直接的侧入口,因此风扇安装在管板的顶部,并以倾斜的角度吹入观察缝,如图3所示。这种方法将失真的幅度减小到一个难以辨认的小尺寸。
总结
靠近光路的热源可以引入图像翘曲,从而局部改变图像内容的位置。对于行扫描相机,在大约一秒的时间内,会出现和消失覆盖了几毫米视场的类似位移的图像区域。这种变化将对图像内容的亚像素分析产生负面影响。为了抑制这种效果,建议沿受来自风扇的层流气流湍流影响的光路覆盖整个体积。
来源:网络收集,犀灵机器人http://www.lingxixueyuan.com整理发布