在许多机器视觉应用中,通常使用工业相机、照明光源、计算机和网络系统在产品制造过程中对其进行检测。例如,检查罐装食品、瓶子、发动机零件和电子子组件的标签方向、填充水平、条形码以及目标物是否存在(见图1)。

图1:高速相机系统可以检查罐装食品、瓶子、发动机零件和电子子组件的标签方向、填充水平、条形码以及目标物是否存在。这种高速生产系统本身也必须受到监控,以诊断可能发生的任何机械故障。
为了高速生产这些产品,复杂的机械传送带和剔除机制必须沿着生产线高速驱动这些产品。由于这些产品的生产速度非常快,因此生产设备的任何故障或失灵,都会导致生产线暂停、维修和重新启动,从而导致昂贵的停机成本。如果与故障相关的问题立即被隔离,那么制造商就可以更快地修复故障,减少停机成本。为了隔离这些故障问题,制造商使用高速视觉系统来检查产品的特性,并监控正在使用的传送带和剔除机制。
现在,已经有一些公司生产集成系统来执行这些任务。与实施机器视觉系统一样,选择使用什么样的系统,高度依赖于特定的应用。被监控的生产线或生产过程的速度,决定了系统中部署的机器视觉相机、相机接口、触发机制、主机(或“事件记录器”)和照明等产品的类型。
更为重要的是,如果发生故障,系统的用户界面必须允许操作员快速隔离故障源头,并通知相关主管人员。
在典型的监控系统中,一台相机或一系列相机与事件记录器连接,以捕获一系列高速图像。对这些图像进行分析,并诊断任何机械设备故障的原因(见图2)。

图2:在典型的监控系统中,一台相机或一系列相机与事件记录器连接,以捕获一系列高速图像。对这些图像进行分析,并诊断任何机械设备故障的原因。
在这种配置中,一旦系统被触发,无论是从相机触发还是通过事件记录器触发,图像都会被存储一段预先设定的时间,以便以后回放和分析。在监控此类高速事件时,系统可以通过几种不同的方式触发。如果一条高速装瓶产线因任何原因出现故障,那么沿着生产线通过的瓶子数量将会减少。
传感系统
此类事件通常使用不同类型的传感器检测,其中最常用的是光电传感器。这些传感器检测从传感器发出和接收的光之间的强度变化。Pepperl+Fuchs等公司提供此类光电传感器,这类传感器也可用于计算通过生产线的瓶子数量,因为传感器将检测一系列可测量的脉冲。如果脉冲之间的周期发生了显著变化,则可以对传感器进行编程,以输出PNP/NPN信号来触发相机或计算机。
光电传感器有多种类型,从透射型传感器、反射型传感器到漫反射型传感器和色彩传感器,所有这些传感器都可用于检测高速生产线上可能发生的任何虚假事件。例如,当此类机械发生故障时,设备的振动水平可能会增加。因此,振动分析系统可以用来确定生产设备的状况。
通过使用传感器测量设备的位移、速度和加速度,可以监测振动水平,并将这些传感器的输出结果与预期值范围进行比较,再利用这个比较结果触发相机或计算机。Hansford Sensors等公司生产此类传感器。
光电传感器、振动传感器和声学传感器,都可以用来触发图像捕捉序列,也可以用来处理来自相机的信息。这可以通过使用相对简单的算法分析捕获的图像、并在发生任何变化时触发系统来实现。例如,可以分析图像的灰度值,并与已知参考值的范围进行比较。或者,可以将传入图像之间的像素到像素的差异与参考图像进行比较,如果这些差异超出指定范围,系统将触发记录图像序列。
减少延迟
在开发此类系统时,系统集成商必须认识到,无论选择何种传感器或相机,传感器或相机检测到事件的时间,与开始记录图像序列的时间之间,存在一定的时间延迟。这个时间延迟从几微秒到几毫秒不等,这取决于图像序列是使用相机上的I/O触发器触发的,还是使用事件记录器上的I/O触发器触发的。
为了减少延迟,许多系统使用相机I/O触发器触发,就像使用事件记录器或可编程逻辑控制器(PLC)时一样,由于轮询中断并向相机生成触发信号需要时间,因此延迟将更长。在这里,最小延迟是由“通过软件轮询输入并生成相机触发器以启动图像序列所需的时间”决定的。
同样,使用相机或运行在事件记录器或PLC上的软件,来检测和分析捕获的图像也会增加延迟,因为这将涉及图像捕获、图像分析,然后生成一个输出信号。因此,使用相机触发系统往往更复杂,并且具有更长的系统延迟。
正如如何触发相机在此类系统的设计中起着重要作用一样,选择使用哪种相机同样重要。为高速成像而设计的相机,往往都是针对特定应用而专门设计的。例如,对于弹道和汽车碰撞测试等应用,即使是最快的相机接口,也不能用1024×1024的CMOS传感器来捕获图像序列。
因此,Vision Research和Photron等相机厂商开发出了Phantom V2512和FastCam SA-Z等相机,它们分别能以高达10000fps和25000fp的帧率,捕获1280×800×12位像素和1024×1024×12位像素的图像数据。因此,相机需要捕获数百GB的数据。
为了捕获这些图像,此类相机必须设计为具有千兆字节的板载存储器,以便图像序列可以捕捉、存储,然后通过高速接口传输,后续再用运动分析软件进行分析。此类接口通常基于GigE或10GigE标准。
这种高速相机的接口选择有几个原因。首先,GigE接口是可扩展的,目前的范围包括GigE、10GigE、40GigE和100GigE。其次,与CoaXPress(CXP)等支持高达100Gbit/s带宽的标准不同,价格经济的基于PC的图像采集卡,通过相机与计算机连接,从而降低系统成本。最后,尽管基于CXP标准的最大电缆长度约为70m,但基于GigE的方案可以使用电缆将相机到计算机的连接距离扩展到100m。
利用GigE Vision的强大功能,相机供应商正在推出低成本、高速相机,这些相机不需要板载相机内存来存储图像数据。虽然这种相机仍然不能用于非常高速的应用,但它们正被部署在要求较低的工厂过程监控应用中。
例如,Imperx B0620是一款640×480像素的CCD GigE相机,具有以太网供电(PoE)功能,它可以与Imperx公司的以太网/IP过程视频记录器(EIPVR)连接,以250fps或更低的帧率录制60秒或更长的视频。在运行中,系统自动将图像保存到记录系统,并使用Imperx公司的记录和回放软件,以用户可配置的回放速度观看记录的事件(见图3)。因此,可以部署该系统来消除线路中断,排除机械设备故障,而无需昂贵的专用高速相机或基于CXP的高成本解决方案。
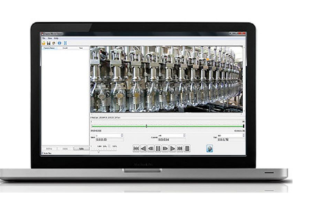
图3:记录和回放软件,能以用户配置的回放速度,观看记录的事件。
为了以250fps的帧率捕获图像,并消除图像模糊,通常使用频闪LED照明。在这里,闪光灯的发射必须与相机的曝光时间同步。为了确保这一点,制造商提供了专用的频闪灯。例如,Imperx提供LED PoE环形灯,以简化此类LED的安装。在设计中,环形灯通过PoE接口驱动,可以直接从相机触发(见图4)。

图4:Imperx公司提供LED PoE环形灯,以简化LED频闪灯的安装。在设计中,环形灯通过PoE接口驱动,可直接从相机触发。
文章来源:互联网,犀灵机器人http://www.lingxixueyuan.com整理发布