变频器是把工频电源(50Hz或60Hz)变换成各种频率的交流电源,以实现电机的变速运行的设备,其中控制电路完成对主电路的控制,整流电路将交流电变换成直流电,直流中间电路对整流电路的输出进行平滑滤波,逆变电路将直流电再逆成交流电。对于如矢量控制变频器这种需要大量运算的变频器来说,有时还需要一个进行转矩计算的CPU以及一些相应的电路。变频调速是通过改变电机定子绕组供电的频率来达到调速的目的。
变频器的分类方法有多种,按照主电路工作方式分类,可以分为电压型变频器和电流型变频器;按照开关方式分类,可以分为PAM控制变频器、PWM控制变频器和高载频PWM控制变频器;按照工作原理分类,可以分为V/f控制变频器、转差频率控制变频器和矢量控制变频器等;按照用途分类,可以分为通用变频器、高性能专用变频器、高频变频器、单相变频器和三相变频器等。
VVVF:改变电压、改变频率 CVCF:恒电压、恒频率。各国使用的交流供电电源,无论是用于家庭还是用于工厂,其电压和频率均为400V/50Hz或200V/60Hz(50Hz),等等。通常,把电压和频率固定不变的交流电变换为电压或频率可变的交流电的装置称作“变频器”。为了产生可变的电压和频率,该设备首先要把电源的交流电变换为直流电(DC)。
用于电机控制的变频器,既可以改变电压,又可以改变频率。
变频器的工作原理:
我们知道,交流电动机的同步转速表达式位:
n=60 f(1-s)/p (1)
式中
n———异步电动机的转速;
f———异步电动机的频率;
s———电动机转差率;
p———电动机极对数。
由式(1)可知,转速n与频率f成正比,只要改变频率f即可改变电动机的转速,当频率f在0~50Hz的范围内变化时,电动机转速调节范围非常宽。变频器就是通过改变电动机电源频率实现速度调节的,是一种理想的高效率、高性能的调速手段。
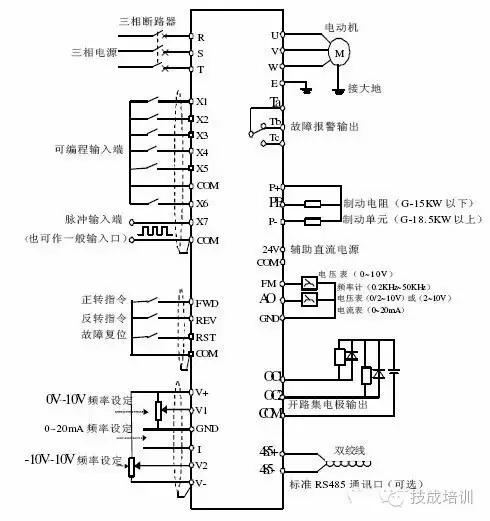
变频器接线图:
变频器控制方式
低压通用变频输出电压为380~650V,输出功率为0.75~400kW,工作频率为0~400Hz,它的主电路都采用交—直—交电路。其控制方式经历了以下四代。
1U/f=C的正弦脉宽调制(SPWM)控制方式
其特点是控制电路结构简单、成本较低,机械特性硬度也较好,能够满足一般传动的平滑调速要求,已在产业的各个领域得到广泛应用。但是,这种控制方式在低频时,由于输出电压较低,转矩受定子电阻压降的影响比较显著,使输出最大转矩减小。另外,其机械特性终究没有直流电动机硬,动态转矩能力和静态调速性能都还不尽如人意,且系统性能不高、控制曲线会随负载的变化而变化,转矩响应慢、电机转矩利用率不高,低速时因定子电阻和逆变器死区效应的存在而性能下降,稳定性变差等。因此人们又研究出矢量控制变频调速。
电压空间矢量(SVPWM)控制方式
它是以三相波形整体生成效果为前提,以逼近电机气隙的理想圆形旋转磁场轨迹为目的,一次生成三相调制波形,以内切多边形逼近圆的方式进行控制的。经实践使用后又有所改进,即引入频率补偿,能消除速度控制的误差;通过反馈估算磁链幅值,消除低速时定子电阻的影响;将输出电压、电流闭环,以提高动态的精度和稳定度。但控制电路环节较多,且没有引入转矩的调节,所以系统性能没有得到根本改善。
矢量控制(VC)方式
矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。矢量控制方法的提出具有划时代的意义。然而在实际应用中,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。
直接转矩控制(DTC)方式
1985年,德国鲁尔大学的DePenbrock教授首次提出了直接转矩控制变频技术。该技术在很大程度上解决了上述矢量控制的不足,并以新颖的控制思想、简洁明了的系统结构、优良的动静态性能得到了迅速发展。目前,该技术已成功地应用在电力机车牵引的大功率交流传动上。直接转矩控制直接在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩。它不需要将交流电动机等效为直流电动机,因而省去了矢量旋转变换中的许多复杂计算;它不需要模仿直流电动机的控制,也不需要为解耦而简化交流电动机的数学模型。
矩阵式交—交控制方式
VVVF变频、矢量控制变频、直接转矩控制变频都是交—直—交变频中的一种。其共同缺点是输入功率因数低,谐波电流大,直流电路需要大的储能电容,再生能量又不能反馈回电网,即不能进行四象限运行。为此,矩阵式交—交变频应运而生。由于矩阵式交—交变频省去了中间直流环节,从而省去了体积大、价格贵的电解电容。它能实现功率因数为l,输入电流为正弦且能四象限运行,系统的功率密度大。该技术目前虽尚未成熟,但仍吸引着众多的学者深入研究。其实质不是间接的控制电流、磁链等量,而是把转矩直接作为被控制量来实现的。具体方法是:
-
控制定子磁链引入定子磁链观测器,实现无速度传感器方式;
-
自动识别(ID)依靠精确的电机数学模型,对电机参数自动识别;
-
算出实际值对应定子阻抗、互感、磁饱和因素、惯量等算出实际的转矩、定子磁链、转子速度进行实时控制;
-
实现Band—Band控制按磁链和转矩的Band—Band控制产生PWM信号,对逆变器开关状态进行控制。
矩阵式交—交变频具有快速的转矩响应(<2ms),很高的速度精度(±2%,无PG反馈),高转矩精度(<+3%);同时还具有较高的起动转矩及高转矩精度,尤其在低速时(包括0速度时),可输出150%~200%转矩。
文章来源:互联网,犀灵机器人http://www.lingxixueyuan.com整理发布