近年来,机器视觉技术的应用变得越来越复杂,工业领域的图像处理更多的专注于3D传感器,而且越来越多的3D技术已经完善并且投入到实际应用中,比如焊缝的检测,以及在生产过程中对未分类部件进行仓拣或精确测量等。可以说,机器视觉已经越来越多的转向了3D成像。
在过去的几年里,点云评估和测量软件也得到了快速的发展:从单一的图像数据转换成点云数据,对点云数据进行测量,计数和点云匹配。
正如图像处理行业的大多数玩家所知道的,获得3D图像有几种不同的方式。
激光三角测量法
对于激光三角测量,需要在结构化光源(如激光线投影)上精确校准相机,以确保即使在高环境温度下也能获得高于1 kHz的高采样率。通常测试对象在3D传感器下方移动以捕获3D点云,这意味着摄像机将检测投射到物体上的激光线,并根据激光线轮廓计算高度信息。在相机下移动物体时,会创建多个配置文件,用于完成三维图像。典型的设置包含一个激光器,它直接位于测试对象和相机之间,相机与激光器成30°角安装。但是激光和相机的其他角度组合也是可以的。例如,为了获得更准确的高度分辨率,相机和激光之间的角度可以加宽。但必须注意的是,角度越小,进入照相机的光就越多,评估结果就会更稳定。

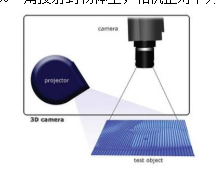
3D立体相机
3D立体相机是另一种方法。它已经存在多年,越来越多地用于机器人或调试应用。立体图像处理使用与人眼相同的原理,即立体偏移。为了获得3D图像,该方法采用两台相机。但由于测试对象并不总是具有相同的特定特征,因此经常使用随机模式投影。
结构光扫描技术
维视图像基于双相机的立体视觉技术和结构光的视觉扫描技术,推出的三维扫描重构系统研究开发平台MV-3DLSSP就集成了结构光技术、视觉扫描技术、运动控制技术、三维重构技术、点云处理技术等。
维视图像推出的MV-3DLSSP系统采用开放式设计,既可以作为一款三维扫描仪来使用,也可以作为三维扫描实验平台用于研究。
条纹投影法
其基本原理也是三角测量,但是测试对象的整个表面都是用一次拍摄捕捉的。激光将光投射到条纹图案中,因此物体不必在传感器下方移动。光线从30°角投射到物体上,相机正对下方物体。
这种方法的测量范围可以从不到一毫米缩放到一米以上,但分辨率也会有相应地变化。由于其测量速度快,分辨率高,条纹投影可以用于小型和大型测试物体,在工业检查中,应用于包括形状偏差检查、完整性检测、组件部件位置或体积测量等。但需要注意的是,条纹投影对周围的光很敏感。
机器视觉行业对3D成像的新可能性寄予厚望,让我们拭目以待。
文章来源:互联网,犀灵机器人http://www.lingxixueyuan.com整理发布